Yükleniyor
SINAMICS V90 servo sürücü sistemi, SIMOTICS S-1FL6 servo motorunu entegre artımsal enkoder ile hassas bir şekilde kontrol etmektedir. Bu gelişmiş sistem, SIMATIC S7-1200 PLC'nin Puls Dizisi Çıkışı (PTO) arayüzü üzerinden yönetilmektedir. SIMATIC S7-1200 PLC'lerde maksimum 4 adet puls dizisi çıkışı (PTO) yapılandırılabilir, bu da sistem esnekliğini artırmaktadır.
Hareket kontrolü, S7-1200 PLC'nin Hareket Kontrol (Motion Control - MC) sistem blokları aracılığıyla gerçekleştirilir. Bu gelişmiş sistem blokları sayesinde çeşitli hareket fonksiyonları mikron seviyesinde hassasiyetle yönetilebilmektedir. Modern endüstriyel otomasyon sistemlerinde bu tür hassas hareket kontrolü, üretim kalitesi ve verimliliği açısından kritik öneme sahiptir.
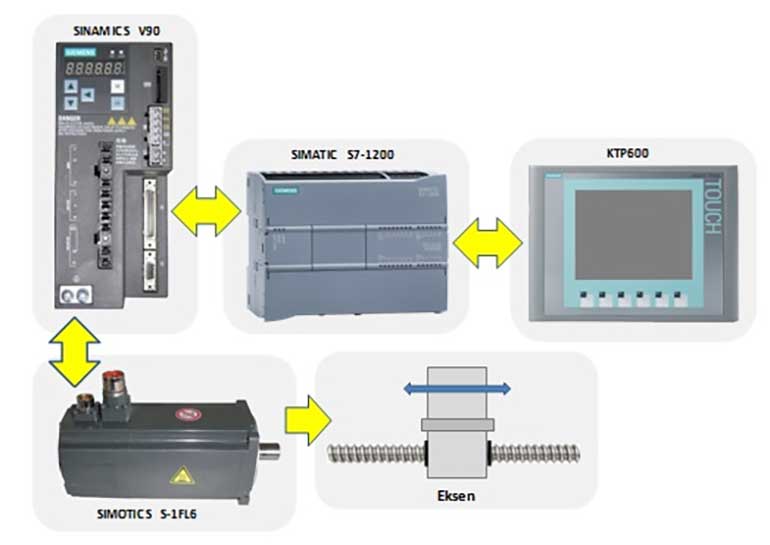
Şekil 1: Genel Bakış
SINAMICS V90, olağandışı çalışma şartlarında motoru güvenli bir şekilde durdurabilir. Motor aşağıdaki güvenlik mekanizmalarıyla durdurulabilir:
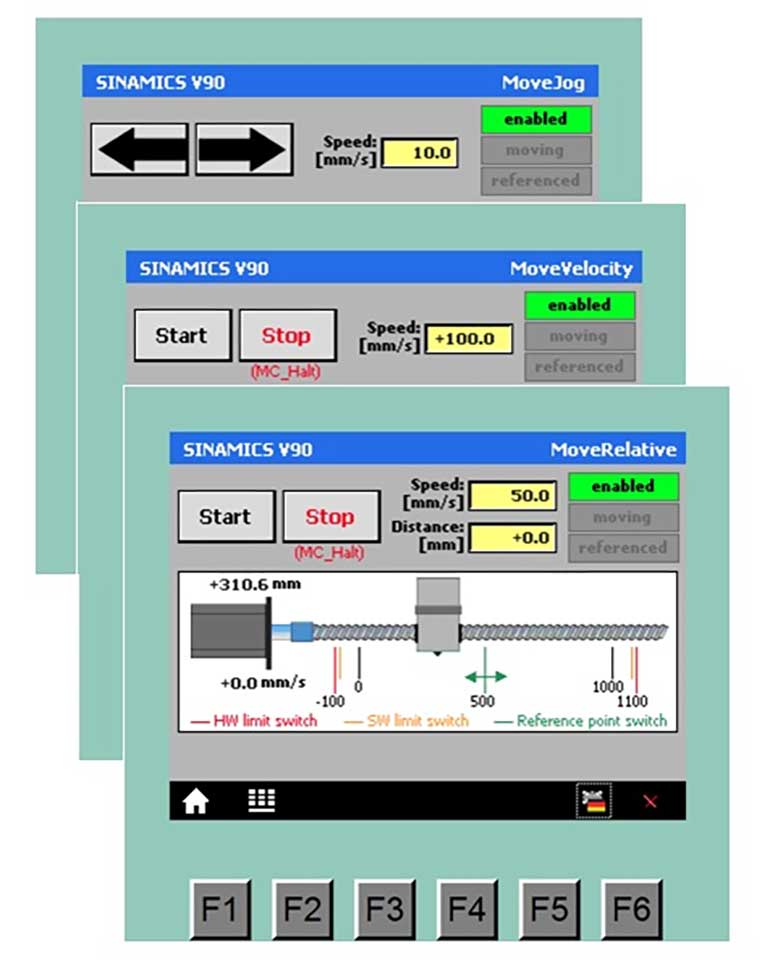
Şekil 2: Operatör Panel Sayfaları
Sistem konfigürasyonu örneği: Pals dizisi giriş pozisyon kontrolü (PTI) ile çalışan uygulama, SINAMICS V90 servo sürücü, SIMOTICS S-1FL6 servo motor, SIMATIC S7-1200 PLC ve SIMATIC BASIC PANEL KTP-600 operatör paneli entegrasyonu ile gerçekleştirilmiştir. Bu kombinasyon, endüstriyel uygulamalar için optimal performans ve güvenilirlik sağlar.
Ekseni hareket ettirmek için SIMATIC Basic Panel KTP600’de oluşturulmuş sayfalardaki butonlar ve nümerik giriş alanları kullanılmaktadır.
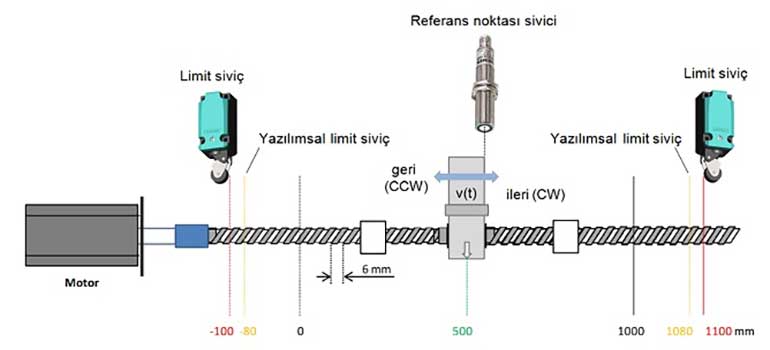
Şekil 3: Örnek Lineer Eksen
Örnek uygulama aşağıdaki lineer eksen temel alınarak hazırlanmıştır.
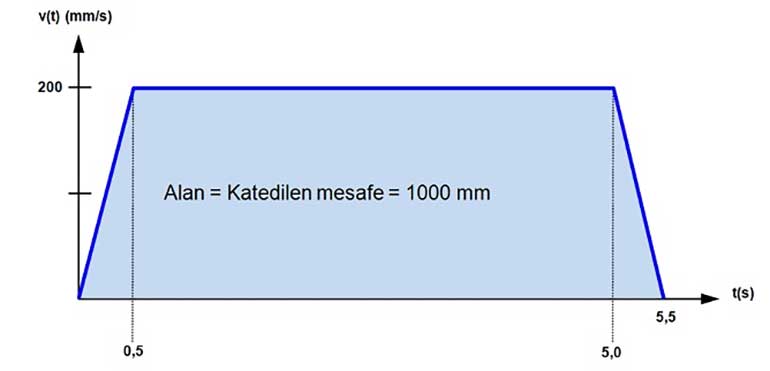
Şekil 4: Örnek Hareket profili
Sistem, 1000 milimetrelik bir eksen hareket mesafesine sahiptir. Hızlanma ve yavaşlama rampaları 0.5 saniye olarak ayarlanmıştır ve toplam pozisyonlama işlemi yaklaşık 5.5 saniye içinde tamamlanmaktadır.
Sistemin arayüz bağlantıları Şekil 5'te detaylı olarak gösterilmiştir. Uygulama kapsamında güvenlik ve kontrol için şu bileşenler kullanılmıştır:
Bu bileşenler fiziksel olarak bağlanabildiği gibi, test ve simülasyon amaçlı olarak KTP600 üzerinden de kontrol edilebilmektedir. Gerçek uygulamada, dijital girişlere bağlanan kontak elemanları şemada gri kesik çizgilerle gösterilmiştir.
Önemli Not: SINAMICS V90'ın dijital çıkışları NPN tipindedir. Bu nedenle, SINAMICS V90'ın dijital çıkış sinyallerinin SIMATIC S7-1200 dijital girişleri tarafından doğru şekilde okunabilmesi için, S7-1200 X10 konnektörünün 1M terminaline 0V(M) yerine 24V(L+) bağlantısı yapılmalıdır.
Sistem konfigürasyonunda, referans noktası anahtarının terminaline 0V(M) bağlantısı yapılması gerekmektedir (detaylı bağlantı şeması için Şekil 5'e başvurunuz).
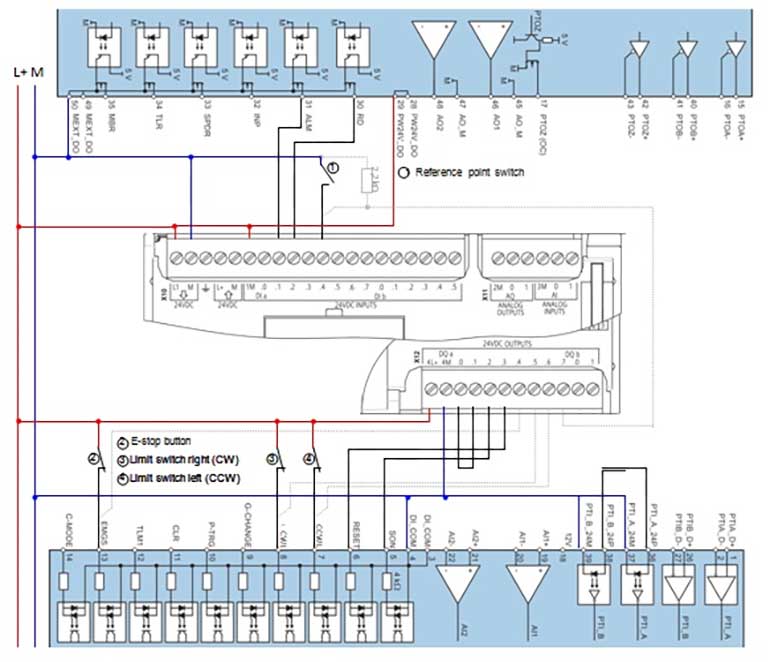
Şekil 5: SINAMICS V90 X8 konnektörü ile SIMATIC S7-1200 arasındaki bağlantı şeması
TIA Portal DriveLib kütüphanesi, SINAMICS S/G serisi sürücülerle kolay ve etkili haberleşme sağlamak için tasarlanmış fonksiyon bloklarını içerir.
Bu kütüphane, SINAMICS S120 çok eksenli kontrolcü, SINAMICS S110 kontrolcü ve SINAMICS G120 kontrolcü gibi farklı sürücü tiplerini destekler.
Haberleşme, endüstriyel standartlar olan PROFIBUS ve PROFINET protokolleri üzerinden gerçekleştirilir.
SIMATIC S7 kontrolcü ile SINAMICS sürücü arasındaki veri iletişimi iki şekilde yapılır:
Periyodik veri iletişimi özellikleri:
Periyodik olmayan veri iletişimi özellikleri:
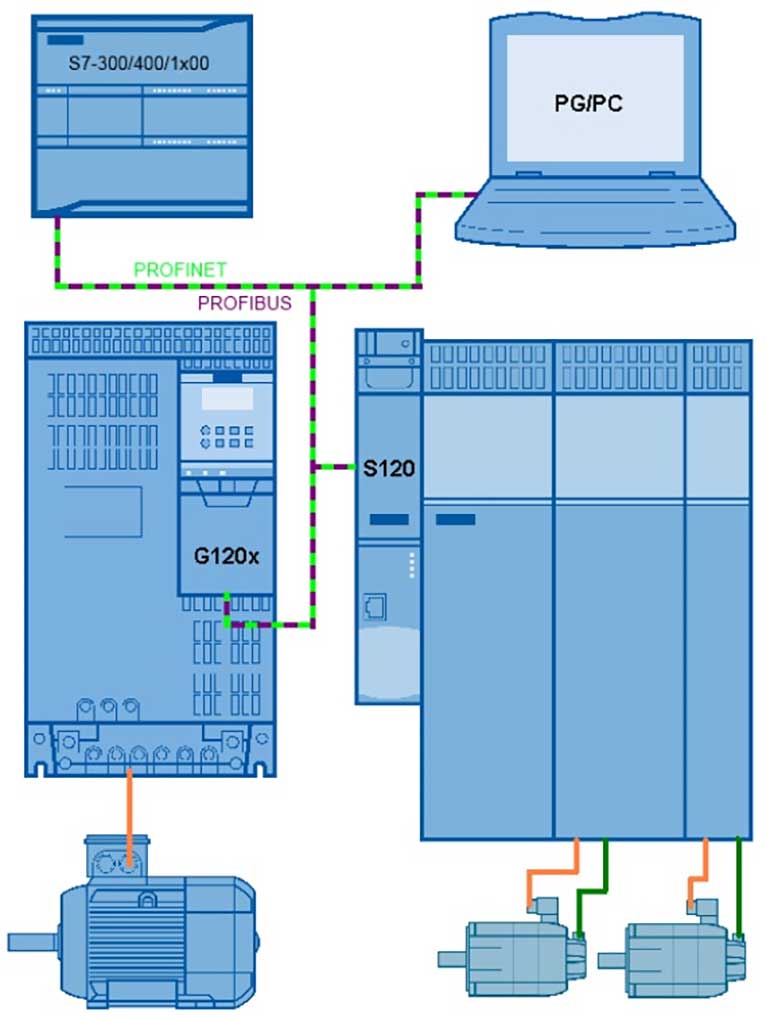
Şekil 6: Genel Bakış
Kütüphanedeki fonksiyon blokları TIA Portal V12 SP1 veya daha yeni versiyon yazılımlarla yapılandırılabilir. Sürücülerin konfigürasyonu ve parametre ayarları iki farklı yöntemle gerçekleştirilebilir:
SIMATIC S7 PLC kullanarak:
Sistem Entegrasyonu ve Kullanım Kolaylığı:
DriveLib kütüphanesi, SINAMICS sürücü sistemlerindeki farklı teknoloji eksenleriyle haberleşmeyi sağlayan üç temel fonksiyon bloğundan oluşur. Bu sistem, hız kontrollü ve pozisyon kontrollü eksenleri önceden yapılandırılmış data blok örnekleriyle telegramlara entegre eder.
Pozisyonlama fonksiyon bloğu FB284 (SINA_POS), uygulamalar için kapsamlı bir giriş ve çıkış arayüzü sunar. Bu blok, önceden tanımlanmış arayüzü sayesinde EPOS çalışma modlarını etkin bir şekilde yönetir. Telegram 111'deki bazı değişkenler doğrudan fonksiyon bloğu arayüzüne bağlanmamış olsa da, bu değişkenlere örnek data blok üzerinden erişilebilir.
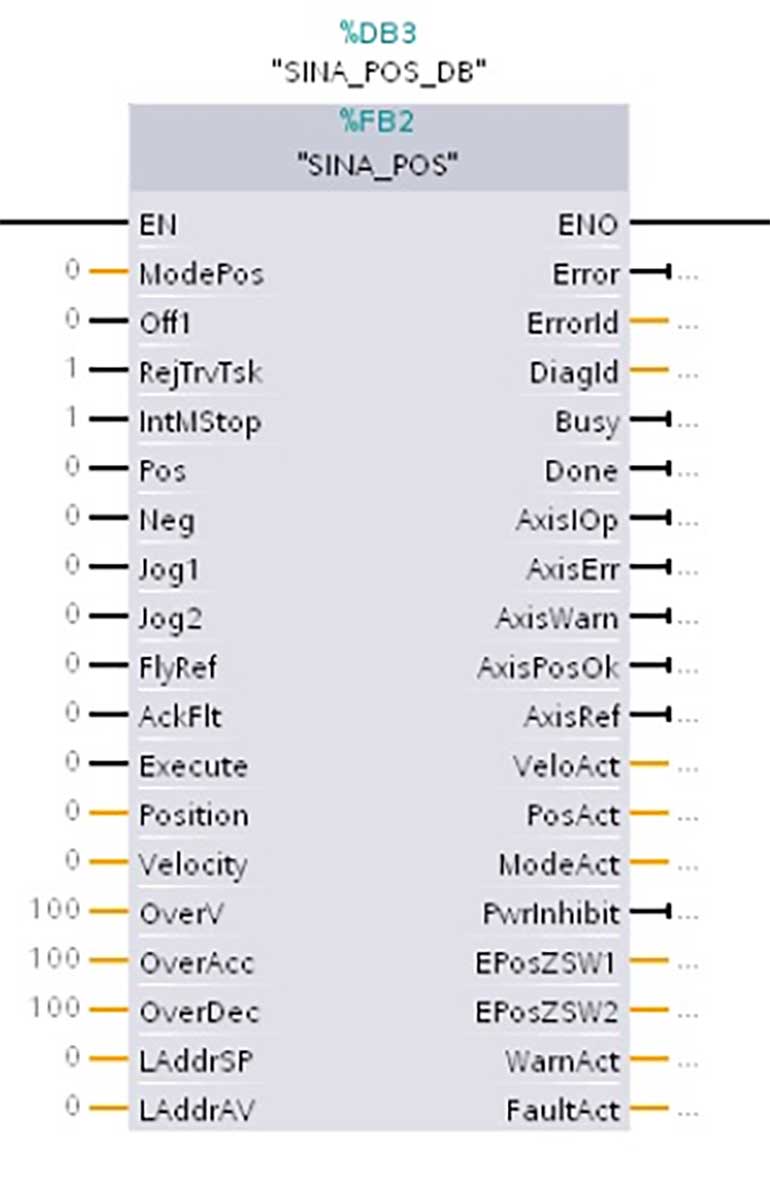
Şekil 7: FB284 (SINA_POS) fonksiyon blok arayüzünün ladder programında görünümü
Hız kontrol fonksiyon bloğu FB285 (SINA_SPEED), temel hız kontrolü işlemleri için basit bir giriş-çıkış arayüzü sağlar. Kullanıcının dikkat etmesi gereken önemli bir nokta, SINAMICS sürücüde ayarlanmış olan referans hız parametresinin (P2000) değeri ile fonksiyon bloğunun FactRPM giriş değerinin mutlaka aynı olması gerektiğidir. Bu eşleşme, sistemin doğru ve hassas bir şekilde çalışması için kritik öneme sahiptir.
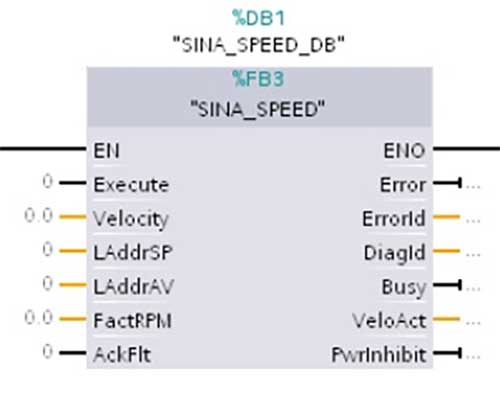
Şekil 8: FB285 (SINA_SPEED) fonksiyon blok arayüzünün ladder programında görünümü
Periyodik olmayan haberleşme bloğu FB286 (SINA_PARA), kullanıcıya önceden tanımlanmış arayüzde 16 parametreyi kolaylıkla okuma ve yazma imkanı sunar. Kullanıcının yapması gereken tek şey, parametre numarasını, indeksini ve işlem türünü (okuma veya yazma) belirlemektir. İşlem, start komutuyla başlatılır ve sistem otomatik olarak gerekli veri alışverişini gerçekleştirir. Bu fonksiyon bloğu, SINAMICS G ve S serisi sürücülerin parametrelerini yönetmek için tasarlanmış olup, kullanıcı dostu arayüzü sayesinde karmaşık parametre işlemlerini basitleştirir. Ayrıca, blok içindeki hata kontrol mekanizmaları sayesinde güvenli ve güvenilir bir parametre yönetimi sağlar.
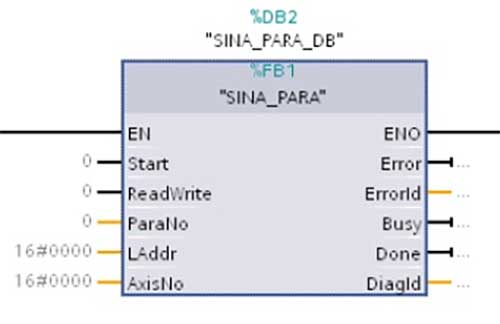
Şekil 9: FB285 (SINA_PARA) fonksiyon blok arayüzünün ladder programında görünümü
Periyodik olmayan haberleşme bloğu FB287 (SINA_PARA_S), kullanıcıya önceden tanımlanmış arayüz üzerinden herhangi bir parametreyi kolayca okuma ve yazma imkanı sunar. Kullanıcının yapması gereken tek şey, parametre numarasını, indeksini ve işlemin türünü (okuma veya yazma) belirlemektir. İşlem, start komutu verildiğinde otomatik olarak başlar ve sistem gerekli veri alışverişini gerçekleştirir. Bu fonksiyon bloğu, SINAMICS G ve S serisi sürücülerin parametrelerini yönetmek için özel olarak tasarlanmış olup, kullanıcı dostu arayüzü sayesinde parametre işlemlerini basitleştirir. Ayrıca, entegre hata kontrol mekanizmaları ile güvenli ve güvenilir bir parametre yönetimi sağlar.
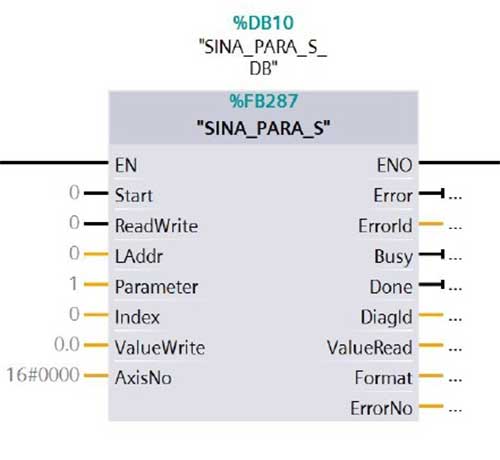
Şekil 10: FB287 (SINA_PARA_S) fonksiyon blok arayüzünün ladder programında görünümü